Printing Reconfigurable Bundles
of Dielectric Elastomer Fibers
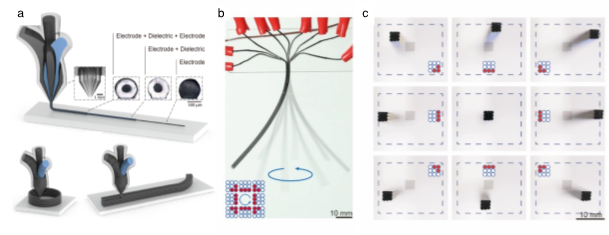
A team at the Harvard MRSEC led by Clarke and Lewis has developed a multi-core-shell 3D printing method for fabricating dielectric elastomer fibers, coils, and bundles that exhibit programmed actuation. First, conductive and dielectric matrix inks were produced with the requisite rheological, electrical, and mechanical properties for printing of dielectric elastomer fibers (DEFs). Next, an analytical model was developed to predict the deformation of individual DEFs. Inspired by human muscles, the team generated reconfigurable DEF bundles using this approach, in which each fiber is individually addressable. These DEF bundles could be steered in eight different directions by exploiting this feature. This platform opens new avenues for the integrated design and fabrication of programmable soft matter in three dimensions.
Publication:
A. Chortos, J. Mao, J. Mueller, E. Hajiesmaili, J.A. Lewis, and D.R. Clarke, "Printing Reconfigurable Bundles of Dielectric Elastomer Fibers", Advanced Functional Materials 2010643 (2021) ![]()
![]()
David R. Clarke (Material Science & Mechanical Engineering), and
Jennifer A. Lewis (Material Science & Bioengineering)
2020-2021 Harvard MRSEC (DMR-2011754)