Soft Inflatable Materials based on Kirigami
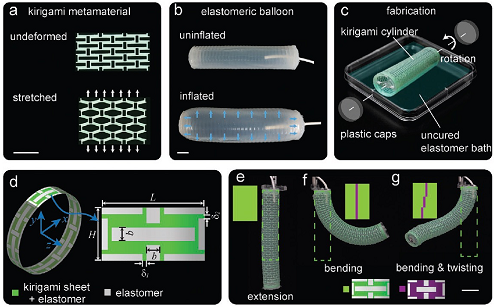
Inspired by Whitesides and Wood, Bertoldi designed, fabricated, and modeled the response of inflatable soft architectures composed of kirigami sheets embedded into an unstructured elastomeric membrane. She showed that their inflated shape can be controlled by tuning the geometric parameters of the kirigami pattern. By applying a simple optimization algorithm, she identified the best parameters that enable these inflatable materials to transform into a family of target shapes at a given pressure. Due to their tessellated nature, these parameters can be manipulated to induce shape-shifting features at different scales. These soft inflatable materials may find potential application in soft robotics.
Publication:
Jin, L., A.E. Forte, B. Deng, A. Rafsanjani, and K. Bertoldi, "Kirigami‐inspired inflatables with programmable shapes," Advanced Materials 32 (33), 2001863-7 (2020) ![]()
![]()
Katia Bertoldi (Mechanical Engineering), Robert J. Wood (Robotics), and George M. Whitesides (CCB)
2020-2021 Harvard MRSEC (DMR-1420570)