Hopping Towards a Better Soft Robot
A 3-D-printed, functionally graded soft robot powered by combustion
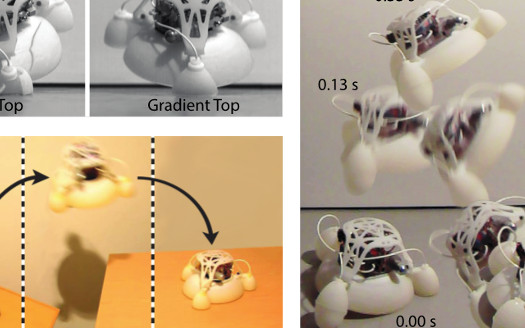
Biologically inspired robots with soft or partially soft bodies have the potential to be more robust and adaptable, and safer for human interaction, than traditional rigid robots. A key challenge in their manufacture is the integration of soft and hard materials. A Harvard MRSEC team led by Katia Bertoldi, Jennifer Lewis, George Whitesides, and Robert Wood has used three-dimensional (3-D) printing to create soft robots that move autonomously. Described in the July 10, 2015 issue of Science, they use multimaterial 3-D printing to manufacture a robot whose body transitions from a rigid core to a soft exterior (shown in A). This stiffness gradient, spanning three orders of magnitude in elastic modulus, enables reliable interfacing between rigid driving components (controller, battery, etc.) and the primarily soft body, while also enhancing performance. Powered by combustion of butane and oxygen, this robot is able to perform untethered jumping (shown in B & C).
David A. Weitz (Physics and Applied Physics)
Harvard MRSEC (DMR-1420570)