A Biologically Inspired, Functionally Graded End Effector for Soft Robotics Applications
Hybrid End Effector Design
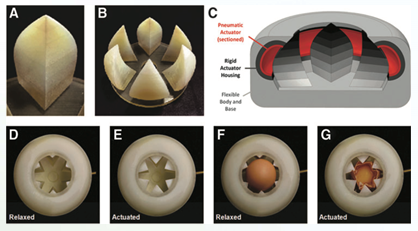
Soft robotic actuators offer many advantages over their rigid counterparts, but they often are unable to apply highly localized point loads. In contrast, many soft bodied invertebrates have evolved extremely strong "hybrid appendages" consisting of rigid and flexible components that are both highly compliant and resilient. In an experimental and theoretical collaboration at the Harvard MRSEC, Aizenberg and Bertoldi have demonstrated a synthetic hybrid end effector for soft-bodied robots that exhibits excellent piercing abilities. This hybrid architecture seamlessly integrates rigid and flexible components via a functionally graded interface, thus largely mitigating stress concentrations between the constituent phases. In addition to its value in soft robotics applications, the functionally graded design strategy could also be adapted for the flexible integration of electronic and electromechanical systems where the targeted functionality depends on the successful interfacing of rigid components to flexible thin film substrates.
Publication:
Kumar, K., J. Liu, C. Christianson, M. Ali, M.T. Tolley, J. Aizenberg, D.E. Ingber, J.C. Weaver, K. Bertoldi, "A Biologically Inspired, Functionally Graded End Effector for Soft Robotics Applications," Soft Robotics (2017) ![]()
![]()
David A. Weitz (Physics & Applied Physics)
2017-2018 Harvard MRSEC (DMR-1420570)