Active Soft Materials
Sensing Deformation and Contact Pressure
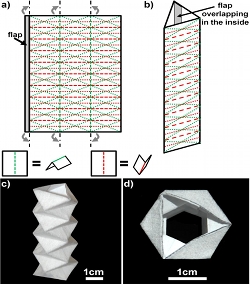
Whitesides developed "Elastomeric Origami," to fabricate soft actuators based on paper-elastomer composites. These pneumatic actuators can perform various complicated structures and actuation modes based on the internal asymmetry that is built on the actuator during its fabrication. Examples of the motions demonstrated by these actuators include: bending, twisting, extension, and contraction.�
David A. Weitz (Physics & Applied Physics)
George M. Whitesides (CCB)
Harvard MRSEC (DMR-1420570)