Digital Assembly of Liquid Crystal Elastomer Actuators
with Spatially Programmed Nematic Order
Programmable shape morphing liquid crystal elastomers
A. Kotikian, R.L. Truby, J.W. Boley, T.J. White, and J.A. Lewis, "3D Printing of Liquid Crystal Elastomeric Actuators with Spatially Programmed Nematic Order," Advanced Materials (2018) — Cover Article ![]()
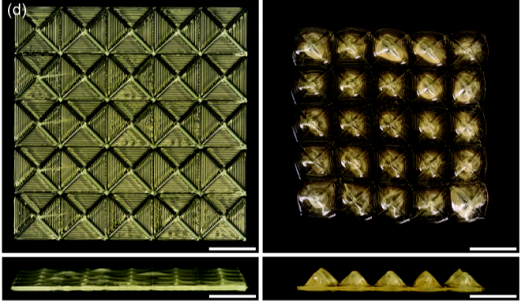
Liquid crystal elastomers (LCEs) are soft materials capable of large, reversible shape changes, which may find potential application as artificial muscles, soft robotics, and dynamic functional architectures. To date, alignment of LCEs has primarily been achieved using command surface, mechanical stretching or applied magnetic fields. A Harvard MRSEC team led by Lewis working in collaboration with White at the Air Force Research Labs (AFRL) recently reported in Advanced Materials the design and digital assembly of LCE actuators with spatially programmed nematic order in arbitrary form factors. They created shape-morphing architectures that undergo reversible planar-to-3D and 3D-to-3D' transformations. These programmable LCEs are capable of repeated actuation with greater than 1600% stroke out-of-plane and a maximum energy density of 39 J/kg.
Jennifer A. Lewis (BioEng), and
Timothy J. White (AFRL)
Harvard MRSEC (DMR-1420570)