Ultra-soft, Nanofiber-reinforced Actuators and Delicate Manipulators
N.R. Sinatra, T. Ranzani, J.J. Vlassak, K.K. Parker, and R.J. Wood, "Nanofiber-reinforced soft fluidic micro-actuators," Journal of Micromechanics and Microengineering 28 (8), 084002-11 (2018).
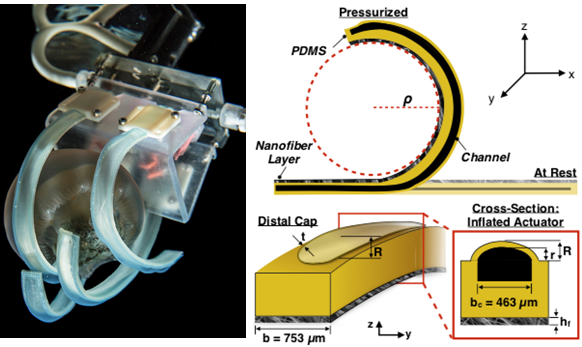
A team at the Harvard MRSEC led by Wood, Vlassak, and Parker has developed a novel architecture for soft fluidic composite actuators that merges the best features from soft lithography and polymer nanofibers. In these actuators, aligned nanofiber sheets are arranged in a multi-layer microfluidic device where channels define actuation sites and the fibers control the orientation of the deformations. Using this concept, the team created actuators that deform in complex patterns by spatially-distributing the fibers with varying orientations. They also developed a model that predicts deformations as a function of geometry, material properties, and applied pressure. These new nanofiber-reinforced soft fluidic actuators can be used in a wide variety of applications from manipulating tissue to sampling gelatinous aquatic animals (see figure).
K.K. Parker (OEB, Physics, SEAS),Joost J. Vlassak (Material Science & Mechanical Engineering), and Robert J. Wood (Robotics)
2018-2019 Harvard MRSEC (DMR-1420570)