Inverse Design of Mechanical Metamaterials with Target Nonlinear Response
via a Neural Accelerated Evolution Strategy
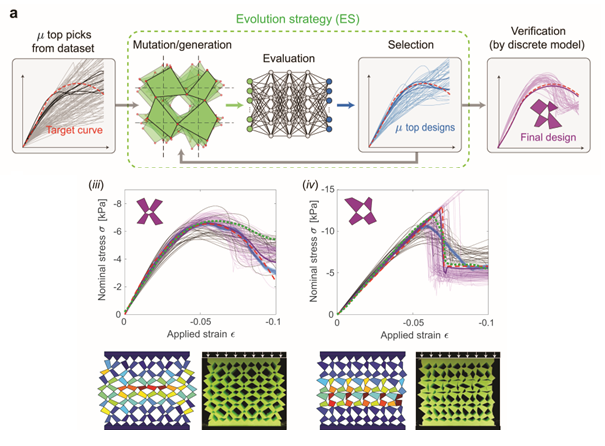
A team at the Harvard MRSEC led by Bertoldi and Rycroft has developed a framework to design mechanical metamaterials with target nonlinear response. Neural networks were used to accurately learn the relationship between the geometry and nonlinear mechanical response of these metamaterials. Next, neural networks were combined with an evolution strategy to efficiently identify geometries that exhibit target nonlinear stress-strain behaviors. Their neural accelerated evolution strategy holds potential for a range of applications that benefit from systems with a target nonlinear mechanical behavior, as demonstrated by the design of energy absorbing systems, soft robots and morphing structures.
Publication:
Deng, B., A. Zareei, X. Ding, J.C. Weaver, C.H. Rycroft, and K. Bertoldi, "Inverse design of mechanical metamaterials with target nonlinear response via a neural accelerated evolution strategy," Advanced Materials 34 (41), 2206238-9 (2022) ![]()
![]()
Katia Bertoldi (Mechanical Engineering) and Christopher H. Rycroft (Applied Math)
2022-2023 Harvard MRSEC (DMR-2011754)